Svojstva grafova u SAGE-u
U ovom dijelu ćemo proći kroz neke naredbe koje ispituju razna svojstva grafa. Paralelno ćemo koristiti uz SAGE naredbe i networkx modul.
import sage.misc.banner
banner()
from IPython.core.display import Image
G1=Graph({1:[2,3,4],2:[4,5],3:[4,5,6],4:[5],5:[6]})
G2=Graph({1:[2,3],2:[3],3:[4],4:[5,5],5:[6]})
G3=Graph({1:[2,6],2:[3,7,8],3:[4],4:[5],5:[6,7,8]})
Tri grafa na kojima ćemo vršiti ispitivanja
G1.plot(pos={1:[0,2],2:[0,0],3:[2,2],4:[1,1],5:[2,0],6:[3,1]},graph_border=True,figsize=[5,4])

G2.plot(pos={1:[0,0],2:[2,0],3:[1,1.5],4:[3,3],5:[4,1.5],6:[5.5,1]},graph_border=True,figsize=[5,4])

G3.plot(pos={1:[0,2],2:[1,2],3:[2,2],4:[2,0],5:[1,0],6:[0,0],7:[-1,1],8:[3,1]},graph_border=True,figsize=[5,4])

Kako bismo te grafove mogli kreirati s networkx modulom
import networkx as nx
from pylab import *
Tri načina spremanja grafova u datoteku. Klikom na linkove ih možemo spremiti na disk, a kasnije opet te datoteke uploadati u SAGE i normalno ih koristiti.
P=nx.petersen_graph()
nx.write_adjlist(P,"petersen.adjlist")
nx.write_edgelist(P,"petersen.edgelist")
nx.write_multiline_adjlist(P,"petersen.multiadjlist")
Učitavanje grafa iz vanjske datoteke
G1nx=nx.read_adjlist("graf1_adjlist.sage",nodetype=int)
G1nx.nodes()
G1nx.edges()
dat1=open("graf1_adjlist.sage",'r')
podaci1=dat1.read()
dat1.close()
podaci1
print(podaci1)
figure(figsize=(4,4))
nx.draw(G1nx,pos={1:[0,2],2:[0,0],3:[2,2],4:[1,1],5:[2,0],6:[3,1]},with_labels=True,node_color='y')

G2nx=nx.read_adjlist("graf2_adjlist.sage",create_using=nx.MultiGraph(),nodetype=int)
G2nx.nodes()
G2nx.edges()
dat2=open("graf2_adjlist.sage",'r')
podaci2=dat2.read()
dat2.close()
podaci2
print(podaci2)
G2sage=Graph(Matrix(nx.to_numpy_matrix(G2nx,dtype=int)))
s2=G2sage.graphviz_string()
os.system("echo '%s' | dot -Kcirco -Tpng > graf2.png" % s2)
Image(filename="graf2.png")

G3nx=nx.read_adjlist("graf3_adjlist.sage",nodetype=int)
G3nx.nodes()
G3nx.edges()
dat3=open("graf3_adjlist.sage",'r')
podaci3=dat3.read()
dat3.close()
podaci3
print(podaci3)
figure(figsize=(4,3))
nx.draw(G3nx,pos={1:[0,2],2:[1,2],3:[2,2],4:[2,0],5:[1,0],6:[0,0],7:[-1,1],8:[3,1]},with_labels=True,node_color='y')

Svojstva grafova
Je li graf prazan?
Promatrani grafovi nisu prazni jer svaki od njih ima barem jedan brid
G1.num_edges(),G2.num_edges(),G3.num_edges()
G1nx.number_of_edges(),G2nx.number_of_edges(),G3nx.number_of_edges()
možemo definirati svoju funkciju koja će vraćati True ako je graf prazan, a u protivnom False.
def is_empty(G):
if type(G)==sage.graphs.graph.Graph:
if G.num_edges()==0:
return True
else:
return False
else:
if G.number_of_edges()==0:
return True
else:
return False
is_empty(G1),is_empty(G2),is_empty(G3)
is_empty(G1nx),is_empty(G2nx),is_empty(G3nx)
is_empty(Graph(5)),is_empty(nx.empty_graph(5))
Broj petlji u grafu
Promatrani grafovi nemaju petlji
G1.number_of_loops(),G2.number_of_loops(),G3.number_of_loops()
nx.number_of_selfloops(G1nx),nx.number_of_selfloops(G2nx),nx.number_of_selfloops(G3nx)
G1.has_loops(),G2.has_loops(),G3.has_loops()
list(nx.selfloop_edges(G1nx)), list(nx.selfloop_edges(G2nx)), list(nx.selfloop_edges(G3nx))
Ima li graf višestrukih bridova
G1.has_multiple_edges(),G2.has_multiple_edges(),G3.has_multiple_edges()
G1nx.is_multigraph(),G2nx.is_multigraph(),G3nx.is_multigraph()
Je li graf usmjeren
G1.is_directed(),G2.is_directed(),G3.is_directed()
G1nx.is_directed(),G2nx.is_directed(),G3nx.is_directed()
Je li graf bipartitni
promatrani grafovi nisu bipartitni
G1.is_bipartite(),G2.is_bipartite(),G3.is_bipartite()
nx.is_bipartite(G1nx),nx.is_bipartite(G2nx),nx.is_bipartite(G3nx)
Kubni graf jest bipartitni
graphs.CubeGraph(3).is_bipartite()
nx.is_bipartite(nx.cubical_graph())
biparticija kubnog grafa
Graph.bipartite_sets(graphs.CubeGraph(3))
nx.bipartite.sets(nx.cubical_graph())
Je li je graf povezan
G1.is_connected(),G2.is_connected(),G3.is_connected()
nx.is_connected(G1nx),nx.is_connected(G2nx),nx.is_connected(G3nx)
Broj komponenata povezanosti
G1.connected_components_number(),G2.connected_components_number(),G3.connected_components_number()
nx.number_connected_components(G1nx),nx.number_connected_components(G2nx),nx.number_connected_components(G3nx)
G=graphs.CompleteGraph(5)
H=graphs.CompleteBipartiteGraph(3,2)
U=G.disjoint_union(H)
Gnx=nx.complete_graph(5)
Hnx=nx.complete_bipartite_graph(3,2)
Unx=nx.disjoint_union(Gnx,Hnx)
U.connected_components_number()
nx.number_connected_components(Unx)
komponente povezanosti grafa
U.plot(graph_border=True,vertex_size=700,layout="spring")

komponente povezanosti
U.connected_components()
komponenta povezanosti koja sadrži vrh (1,1)
U.connected_component_containing_vertex((1,1))
komponente povezanosti kao podgrafovi
komp=U.connected_components_subgraphs()
komp
graphs_list.show_graphs(komp)

figure(figsize=(4,4))
nx.draw_circular(Unx,with_labels=True,node_color='y')

komponente povezanosti
list(nx.connected_components(Unx))
komponente povezanosti kao podgrafovi
komp_Unx=[]
for c in nx.connected_components(Unx):
komp_Unx.append(Unx.subgraph(c).copy())
komp_Unx
figure(figsize=(3,3))
nx.draw_circular(komp_Unx[0],with_labels=True,node_color='y')

figure(figsize=(3,3))
nx.draw_circular(komp_Unx[1],with_labels=True,node_color='y')

Da li je graf jednostavan
def is_simple(G):
if type(G)==sage.graphs.graph.Graph:
if G.number_of_loops()>0:
return False
if len(set(G.edges(labels=False)))!=G.num_edges():
return False
else:
return True
else:
if nx.number_of_selfloops(G)>0:
return False
if len(set(G.edges()))!=G.number_of_edges():
return False
else:
return True
is_simple(G1),is_simple(G2),is_simple(G3)
is_simple(G1nx),is_simple(G2nx),is_simple(G3nx)
Da li je graf potpun
def is_complete(G):
if type(G)==sage.graphs.graph.Graph:
if G.number_of_loops()>0:
return False
if len(set(G.edges(labels=False)))!=G.num_edges():
return False
if G.num_edges()!=(G.num_verts()^2-G.num_verts())/2:
return False
else:
return True
else:
if nx.number_of_selfloops(G)>0:
return False
if len(set(G.edges()))!=G.number_of_edges():
return False
if G.number_of_edges()!=(G.number_of_nodes()^2-G.number_of_nodes())/2:
return False
else:
return True
is_complete(G1),is_complete(G2),is_complete(G3)
is_complete(G1nx),is_complete(G2nx),is_complete(G3nx)
is_complete(graphs.CompleteGraph(8))
is_complete(nx.complete_graph(8))
Da li je graf regularan
G1.is_regular(),G2.is_regular(),G3.is_regular()
def regularan(Gnx):
if len(set(dict(Gnx.degree()).values()))==1:
return (True,list(dict(Gnx.degree()).values())[0])
else:
return False
regularan(G1nx),regularan(G2nx),regularan(G3nx)
graphs.PetersenGraph().is_regular()
regularan(nx.petersen_graph())
graphs.CompleteGraph(8).is_regular()
regularan(nx.complete_graph(8))
Da li je graf aciklički, tj. da li nema ciklusa
def is_acyclic(G):
if type(G)==sage.graphs.graph.Graph:
if G.num_edges()==G.num_verts()-G.connected_components_number():
return True
else:
return False
else:
if G.number_of_edges()==G.number_of_nodes()-nx.number_connected_components(G):
return True
else:
return False
is_acyclic(G1),is_acyclic(G2),is_acyclic(G3)
is_acyclic(G1nx),is_acyclic(G2nx),is_acyclic(G3nx)
is_acyclic(graphs.PathGraph(8))
is_acyclic(nx.path_graph(8))
Da li je graf stablo
G1.is_tree(),G2.is_tree(),G3.is_tree()
graphs.PathGraph(8).is_tree()
def TreeQ(G):
if nx.number_connected_components(G)==1 and G.number_of_edges()==G.number_of_nodes()-1:
return True
else:
return False
TreeQ(G1nx),TreeQ(G2nx),TreeQ(G3nx)
TreeQ(nx.path_graph(8))
Da li je graf ravninski
G1.is_planar(),G2.is_planar(),G3.is_planar()
graphs.CompleteGraph(5).is_planar()
graphs.CompleteBipartiteGraph(3,3).is_planar()
Da li je graf Eulerov
G1.is_eulerian(),G2.is_eulerian(),G3.is_eulerian()
G1e=Graph(G1,multiedges=True)
G1e.add_edge((1,2))
G1e.plot(pos={1:[0,2],2:[0,0],3:[2,2],4:[1,1],5:[2,0],6:[3,1]},graph_border=True,figsize=[5,4])

G1e.is_eulerian()
def EulerianQ(Gnx):
if sum(map(lambda x: x%2,dict(Gnx.degree()).values()))==0 and nx.number_connected_components(Gnx)==1:
return True
else:
return False
EulerianQ(G1nx),EulerianQ(G2nx),EulerianQ(G3nx)
EulerianQ(G1e.networkx_graph())
Da li je graf Hamiltonov
G1.is_hamiltonian(),G3.is_hamiltonian()
G2.is_hamiltonian()
Susjedni vrhovi nekog vrha u grafu
G1.neighbors(2)
G1[2]
[v for v in G1.neighbor_iterator(2)]
list(G1nx.neighbors(2))
G1nx[2]
[v for v in G1nx.neighbors(2)]
Udaljenost dva vrha u grafu
G2.distance(3,1)
G2.distance(2,5)
G2.shortest_path_length(2,5)
nx.shortest_path_length(G2nx,3,1)
nx.shortest_path_length(G2nx,2,5)
Najkraći put između dva vrha u grafu
G2.shortest_path(3,1)
G2.shortest_path(2,5)
G3.shortest_path(1,7)
nx.shortest_path(G2nx,3,1)
nx.shortest_path(G2nx,2,5)
nx.shortest_path(G3nx,1,7)
Udaljenost od zadanog vrha prema svim preostalim vrhovima u grafu
G2.shortest_path_lengths(2)
G2.shortest_path_lengths(4)
G3.shortest_path_lengths(1)
nx.shortest_path_length(G2nx,2)
nx.shortest_path_length(G2nx,4)
nx.shortest_path_length(G3nx,1)
Najkraći putovi od zadanog vrha prema svim preostalim vrhovima u grafu
G2.shortest_paths(2)
G2.shortest_paths(4)
G3.shortest_paths(1)
nx.shortest_path(G2nx,2)
nx.shortest_path(G2nx,4)
nx.shortest_path(G3nx,1)
nx.single_source_shortest_path(G2nx,4)
Najkraće udaljenosti između svaka dva vrha u grafu
G1.distance_all_pairs()
G2.distance_all_pairs()
G3.distance_all_pairs()
dict(nx.shortest_path_length(G1nx))
dict(nx.shortest_path_length(G2nx))
dict(nx.shortest_path_length(G3nx))
Najkraći putovi između svaka dva vrha u grafu
G1.shortest_path_all_pairs()
udaljenosti
G1.shortest_path_all_pairs()[0]
prethodnici pojedinog vrha na najkraćem putu između dva vrha
G1.shortest_path_all_pairs()[1]
nx.shortest_path(G1nx)
G2.shortest_path_all_pairs()[1]
nx.shortest_path(G2nx)
G3.shortest_path_all_pairs()[1]
nx.shortest_path(G3nx)
Ekscentricitet vrha - maksimalna udaljenost vrha od svih preostalih vrhova u grafu
G1.eccentricity()
G1.eccentricity(with_labels=True)
G1.eccentricity([2,3,6],with_labels=True)
G1.eccentricity(5)
G2.eccentricity()
G2.eccentricity(with_labels=True)
G3.eccentricity()
G3.eccentricity(with_labels=True)
nx.eccentricity(G1nx)
nx.eccentricity(G2nx)
nx.eccentricity(G2nx,4)
nx.eccentricity(G3nx)
Radijus grafa - minimalni ekscentricitet
G1.radius()
G2.radius()
G3.radius()
nx.radius(G1nx)
nx.radius(G2nx)
nx.radius(G3nx)
Dijametar grafa - maksimalni ekscentricitet
G1.diameter()
G2.diameter()
G3.diameter()
nx.diameter(G1nx)
nx.diameter(G2nx)
nx.diameter(G3nx)
Struk grafa
G1.girth()
G2.girth()
G3.girth()
Rezni bridovi grafa
list(G1.bridges())
list(G2.bridges())
list(G3.bridges())
Koliko najmanje bridova treba ukloniti iz grafa da on postane nepovezan
G1.edge_connectivity()
G1.edge_connectivity(value_only=False)
G1.edge_connectivity(value_only=False,vertices=True)
G2.allow_multiple_edges(False)
G2.edge_connectivity(value_only=False,implementation="boost")
G3.edge_connectivity(value_only=False)
Koliko najmanje bridova treba ukoniti između dva vrha da graf postane nepovezan, a ta dva vrha da pripadaju različitim komponentama povezanosti
G1.edge_cut(1,3,value_only=False,vertices=True)
G2.edge_cut(2,3,value_only=False,vertices=True)
G2.edge_cut(1,2,value_only=False)
G3.edge_cut(1,5,value_only=False,vertices=True)
Rezni vrhovi grafa
G1.blocks_and_cut_vertices()[1]
G2.blocks_and_cut_vertices()[1]
G3.blocks_and_cut_vertices()[1]
Bikomponente ili blokovi u grafu - maksimalni inducirani podgrafovi koji nemaju reznih vrhova
G1.blocks_and_cut_vertices()[0]
G2.blocks_and_cut_vertices()[0]
G3.blocks_and_cut_vertices()[0]
Koliko najmanje vrhova treba ukloniti iz grafa da on postane nepovezan
G1.vertex_connectivity()
G1.vertex_connectivity(value_only=False)
G1.vertex_connectivity(value_only=False,sets=True)
G2.vertex_connectivity()
G2.vertex_connectivity(value_only=False,sets=True)
G3.vertex_connectivity(value_only=False,sets=True)
Koliko najmanje vrhova treba ukoniti između dva vrha da graf postane nepovezan, a ta dva vrha da pripadaju različitim komponentama povezanosti
G1.vertex_cut(1,4)
G1.vertex_cut(1,5)
G1.vertex_cut(1,5,value_only=False,vertices=True)
G2.vertex_cut(2,4,value_only=False,vertices=True)
G3.vertex_cut(1,3,value_only=False,vertices=True)
Hamiltonov ciklus
G1.hamiltonian_cycle()

G1.hamiltonian_cycle().show()

želimo li istaknuti Hamiltonov ciklus na zadanom grafu, možemo definirati svoju funkciju koja će to raditi
def hamiltonov_ciklus(G,pozicije_vrhova=None,laj="spring",boja="red"):
if not(G.is_hamiltonian()):
return "Error: Graf nije Hamiltonov"
bridovi=G.hamiltonian_cycle().edges(labels=False)
if pozicije_vrhova==None:
slika=G.plot(graph_border=True,edge_colors={boja:bridovi},layout=laj)
else:
slika=G.plot(graph_border=True,edge_colors={boja:bridovi},pos=pozicije_vrhova)
return slika
hamiltonov_ciklus(G1,pozicije_vrhova={1:[0,2],2:[0,0],3:[2,2],4:[1,1],5:[2,0],6:[3,1]}).show(figsize=[5,4])

G2.hamiltonian_cycle()
hamiltonov_ciklus(G2)
hamiltonov_ciklus(G3)
Eulerova tura
G3.eulerian_circuit(labels=False)
G3.eulerian_circuit(labels=False,return_vertices=True)
G3.eulerian_circuit(labels=False,return_vertices=True)[1]
Animacija Eulerove ture
bridovi=G3.eulerian_circuit(labels=False)
animacija=animate([G3.plot(pos={1:[0,2],2:[1,2],3:[2,2],4:[2,0],5:[1,0],6:[0,0],7:[-1,1],8:[3,1]},
graph_border=True,edge_colors={"red":bridovi[0:k]}) for k in srange(0,len(bridovi)+1,1)])
show(animacija.show(delay=150,iterations=0))

Interakcija korak po korak Eulerove ture
bridovi=G3.eulerian_circuit(labels=False)
d=len(bridovi)
@interact
def _(tura=selector([0..d],nrows=1)):
G3.plot(pos={1:[0,2],2:[1,2],3:[2,2],4:[2,0],5:[1,0],6:[0,0],7:[-1,1],8:[3,1]},
graph_border=True,edge_colors={"red":bridovi[0:tura]}).show(figsize=[5,4])

Nekoliko zadataka
1. zadatak
U zadanom grafu pronađite
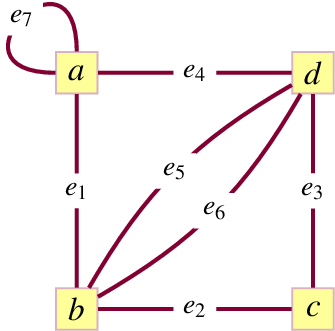
- Sve putove između vrhova $b$ i $d$.
- Sve putove između vrhova $b$ i $c$.
- Broj šetnji duljine $3$ između vrhova $b$ i $c$.
- Ukupni broj svih šetnji duljine $3$.
Rješenje
graf1=Graph({'a':['a','b','d'],'b':['c','d','d'],'c':['d']})
a) dio - donja naredba daje sve putove na pripadnom jednostavnom grafu
graf1.all_paths('b','d')
b) dio - donja naredba daje sve putove na pripadnom jednostavnom grafu
graf1.all_paths('b','c')
c) dio
graf1.vertices()
mat1=graf1.adjacency_matrix();mat1
mat1^3
raspored vrhova u matrici susjedstva je onakav kakav je i u listi graf1.vertices() pa tražimo element na poziciji (1,2) (pazite: indeksiranje počinje s brojem nula)
(mat1^3)[1,2]
(mat1^3)[graf1.vertices().index('b'),graf1.vertices().index('c')]
d) dio
sum(sum(mat1^3))
2. zadatak
Zadana je matrica susjedstva $A=\begin{bmatrix}1&2&1&0\\ 2&0&1&0\\ 1&1&0&0\\ 0&0&0&0\end{bmatrix}$ grafa čiji su vrhovi redom $v_1,v_2,v_3,v_4$.
- Ima li petlji u grafu? Da li je graf jednostavan?
- Ima li izoliranih vrhova u grafu?
- Izračunajte stupnjeve svih vrhova.
- Nacrtajte graf.
- Odredite broj šetnji duljine 2 i duljine 3 između vrhova $v_1$ i $v_2$, te vrhova $v_1$ i $v_4$.
Rješenje
graf2=Graph({'v1':['v1','v2','v2','v3'],'v2':['v3'],'v4':[]})
graf2.vertices(),graf2.edges(labels=False)
a) dio
graf2.has_loops()
graf2.loop_edges()
is_simple(graf2)
graf2.multiple_edges(labels=False)
b) dio - vrh $v_4$ je izolirani vrh
for vrh in graf2.vertices():
if graf2.degree(vrh)==0:
print(vrh,)
c) dio
graf2.degree(labels=True)
d) dio
graf2.plot(graph_border=True,figsize=[5,4])

e) dio
mat2=graf2.adjacency_matrix();mat2
broj $(v_1,v_2)$-šetnji duljine 2
(mat2^2)[0,1]
broj $(v_1,v_4)$-šetnji duljine 2
(mat2^2)[0,3]
broj $(v_1,v_2)$-šetnji duljine 3
(mat2^3)[0,1]
broj $(v_1,v_4)$-šetnji duljine 3
(mat2^3)[0,3]
3. zadatak
- Da li je graf Hamiltonov?
- Postoji li Hamiltonov put u grafu?
- Da li je graf Eulerov?
- Postoji li Eulerova staza u grafu
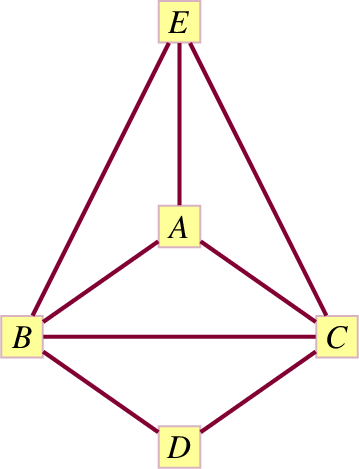
Rješenje
graf3=Graph({'A':['B','C','E'],'B':['C','D','E'],'C':['D','E']})
graf3.plot(graph_border=True,pos={'A':[0,0.7],'B':[-1,0],'C':[1,0],'D':[0,-1],'E':[0,2]},figsize=[4,5])

Zadani graf jest Hamiltonov
graf3.hamiltonian_cycle().plot(layout="circular",figsize=[5,4])

hamiltonov_ciklus(graf3,pozicije_vrhova={'A':[0,0.7],'B':[-1,0],'C':[1,0],'D':[0,-1],'E':[0,2]}).show(figsize=[4,5])

Zadani graf ima Hamiltonov put
Funkcija hamiltonov_put daje bridove nekog Hamiltonovog puta u grafu ukoliko on postoji.
def hamiltonov_put(G):
try:
H=G.copy()
H.add_edges(zip(G.vertices(),['vrh']*G.num_verts()))
ciklus=H.hamiltonian_cycle()
ciklus.delete_vertex('vrh')
return ciklus.edges(labels=False)
except ValueError:
return "Error: Graf nema Hamiltonov put"
hamiltonov_put(graf3)
Funkcija hamiltonov_put_graf ističe neki Hamiltonov put na zadanom grafu ukoliko on postoji.
def hamiltonov_put_graf(G,pozicije_vrhova=None,laj="spring",boja="red"):
try:
H=G.copy()
H.add_edges(zip(G.vertices(),['vrh']*G.num_verts()))
ciklus=H.hamiltonian_cycle()
ciklus.delete_vertex('vrh')
bridovi=ciklus.edges(labels=False)
if pozicije_vrhova==None:
slika=G.plot(graph_border=True,edge_colors={boja:bridovi},layout=laj)
else:
slika=G.plot(graph_border=True,edge_colors={boja:bridovi},pos=pozicije_vrhova)
return slika
except ValueError:
return "Error: Graf nema Hamiltonov put"
hamiltonov_put_graf(graf3,pozicije_vrhova={'A':[0,0.7],'B':[-1,0],'C':[1,0],'D':[0,-1],'E':[0,2]}).show(figsize=[4,5])

Zadani graf nije Eulerov, ali ima Eulerovu stazu zbog toga što je povezan i ima točno dva vrha neparnog stupnja
graf3.is_eulerian()
graf3.degree()
def is_rezni(G,brid):
graf=G.copy()
graf.delete_edge(brid)
if graf.connected_components_number()>G.connected_components_number():
return True
else:
return False
def eulerova_staza(G,izlaz="vrhovi"):
if G.is_eulerian():
return "Graf G ima Eulerovu turu"
neparni_vrhovi=list(filter(lambda vrh: is_odd(G.degree(vrh)), G.vertices()))
if len(neparni_vrhovi)>2:
return "Graf nema Eulerovu stazu"
H=G.copy()
staza=[neparni_vrhovi[0]]
while H.num_edges()!=0:
v=staza[-1]
susjedi=H[v]
if len(susjedi)==1:
staza.append(susjedi[0])
if (v,staza[-1]) in H.edges(labels=False):
H.delete_edge((v,staza[-1]))
else:
H.delete_edge((staza[-1],v))
else:
for vrh in susjedi:
if (v,vrh) in H.edges(labels=False):
brid=(v,vrh)
else:
brid=(vrh,v)
if not(is_rezni(H,brid)):
staza.append(vrh)
H.delete_edge(brid)
break
if izlaz=="vrhovi":
return staza
elif izlaz=="bridovi":
staza2=[]
for k in range(len(staza)-1):
if (staza[k],staza[k+1]) in G.edges(labels=False):
staza2.append((staza[k],staza[k+1]))
else:
staza2.append((staza[k+1],staza[k]))
return staza2
eulerova_staza(graf3)
eulerova_staza(graf3,izlaz="bridovi")
bridovi2=eulerova_staza(graf3,izlaz="bridovi")
d2=len(bridovi2)
@interact
def _(staza=selector([0..d2],nrows=1)):
graf3.plot(pos={'A':[0,0.7],'B':[-1,0],'C':[1,0],'D':[0,-1],'E':[0,2]},graph_border=True,
edge_colors={"red":bridovi2[0:staza]}).show(figsize=[5,4])

4. zadatak
Može li skakač na šahovskoj ploči $n\times n,\ n\geqslant3$, krenuti iz nekog mjestai posjetiti svako polje točno jednom i vratiti se natrag na mjesto otkud je počeo? Skakač se kreće u obliku slova $L$, tj. ![]() .
.
Rješenje
def konjic_skok(m,n):
return Graph([list(map(lambda x:tuple(x), cartesian_product((range(1,m+1),range(1,n+1))).list())),
lambda i,j: (abs(i[0]-j[0])==1 and abs(i[1]-j[1])==2) or (abs(i[0]-j[0])==2 and abs(i[1]-j[1])==1)])
def pozicije_konjic(m,n):
pozicije={}
for i in range(1,m+1):
for j in range(1,n+1):
pozicije[(i,j)]=(j,i)
return pozicije
Na $3\times3$ ploči to nije moguće
konjic_skok(3,3).plot(pos=pozicije_konjic(3,3),graph_border=True,vertex_size=700,figsize=[4,4])

konjic_skok(3,3).is_hamiltonian()
Na $8\times8$ ploči to je moguće
konjic_skok(8,8).is_hamiltonian()
konjic_skok(8,8).plot(pos=pozicije_konjic(8,8),graph_border=True,vertex_labels=False,vertex_size=100,figsize=[5,5])

animacija konjićeve ture na $8\times8$ ploči
Kako bi se lakše pratila animacija, uvodimo sljedeće bojanje polja:
- polja obojana žutom bojom su polja koja je konjić već posjetio.
- polje obojano svijetloplavom bojom je polje na kojem je konjić bio u prethodnom koraku
- polje obojano svijetlozelenom bojom je polje na kojem se konjić trenutno nalazi u tekućem koraku
def bojanje(korak):
if korak==1:
return {"yellow":[redoslijed_vrhova[0]]}
if korak==2:
return {"cyan":[redoslijed_vrhova[0]],"#00FF00":[redoslijed_vrhova[1]]}
if korak>=3:
return {"yellow":redoslijed_vrhova[0:korak-2],"cyan":[redoslijed_vrhova[korak-2]],"#00FF00":[redoslijed_vrhova[korak-1]]}
ploca88=konjic_skok(8,8).hamiltonian_cycle()
redoslijed_vrhova=[(1,1)]
while len(redoslijed_vrhova)<64:
susjedi=ploca88.neighbors(redoslijed_vrhova[-1])
if susjedi[1] in redoslijed_vrhova:
redoslijed_vrhova.append(susjedi[0])
else:
redoslijed_vrhova.append(susjedi[1])
aa=animate([konjic_skok(8,8).plot(pos=pozicije_konjic(8,8),graph_border=True,vertex_labels=False,vertex_shape='s',
vertex_size=1500,edge_colors={"white":konjic_skok(8,8).edges()},
vertex_colors=bojanje(k)) for k in srange(1,65,1)],figsize=[6,6])
aa.show(delay=150,iterations=0)

Ili ako vam je draže interaktivno proučavati svaki korak
konjic88=konjic_skok(8,8)
ploca88=konjic_skok(8,8).hamiltonian_cycle()
redoslijed_vrhova=[(1,1)]
while len(redoslijed_vrhova)<64:
susjedi=ploca88.neighbors(redoslijed_vrhova[-1])
if susjedi[1] in redoslijed_vrhova:
redoslijed_vrhova.append(susjedi[0])
else:
redoslijed_vrhova.append(susjedi[1])
d3=len(redoslijed_vrhova)
@interact
def _(korak=selector([1..d3],nrows=1)):
konjic_skok(8,8).plot(pos=pozicije_konjic(8,8),graph_border=True,vertex_labels=False,vertex_shape='s',vertex_size=1500,
edge_colors={"white":konjic_skok(8,8).edges()},vertex_colors=bojanje(korak)).show(figsize=[7,6])
